Basics of Soft Bodies
Introduction
In physics simulation, a soft body is, as its name suggests, a deformable object, as opposed to rigid bodies. Soft bodies demand a lot more computation resources than rigid bodies because of their complexity to simulate. Indeed, non only their shapes are changing over time, but their internal structures also need to be considered.
Types of meshes
In general, a 3D model can be represented by:
- A triangle mesh, or
- A tetrahedral mesh
In soft body dynamics, a triangle mesh is suitable for clothes since it models only the surface. A tetrahedral mesh, however, has a notion of volume. Indeed, this type of mesh is composed of tetrahedrons, which are ultimately the 3D version of triangles. These ones are suitable for soft bodies with a volume.
In this chapter, we will see how to create triangle mesh soft bodies. For tetrahedral mesh ones (which are built with tetrahedrons), see the Importing from Blender as tetrahedral Soft Bodies chapter.
Changing the world
In order to use soft bodies in Bullet, you must change a few lines in the code in comparison to an only-rigid-body simulation. Of course, you will still be able to use rigid bodies.
Soft bodies in Bullet require a special type of dynamics world, namely the btSoftRigidDynamicsWorld. In addition, it must take btSoftBodyRigidBodyCollisionConfiguration and btDefaultSoftBodySolver objects as parameters at construction.
Thus, instead of initialising the world with this code:
btBroadphaseInterface* broadphase = new btDbvtBroadphase();
btDefaultCollisionConfiguration* collisionConfiguration = new btDefaultCollisionConfiguration();
btCollisionDispatcher* dispatcher = new btCollisionDispatcher(collisionConfiguration);
btSequentialImpulseConstraintSolver* solver = new btSequentialImpulseConstraintSolver;
btDiscreteDynamicsWorld* dynamicsWorld = new btDiscreteDynamicsWorld(dispatcher, broadphase, solver, collisionConfiguration);
We will need to use this code:
btBroadphaseInterface* broadphase = new btDbvtBroadphase();
// This line has changed
btSoftBodyRigidBodyCollisionConfiguration* collisionConfiguration = new btSoftBodyRigidBodyCollisionConfiguration();
btCollisionDispatcher* dispatcher = new btCollisionDispatcher(collisionConfiguration);
btSequentialImpulseConstraintSolver* solver = new btSequentialImpulseConstraintSolver;
// This line has been added
btSoftBodySolver* softSolver = new btDefaultSoftBodySolver;
// This line has changed
btSoftRigidDynamicsWorld* dynamicsWorld = new btSoftRigidDynamicsWorld(dispatcher, broadphase, solver, collisionConfiguration, softSolver);
Do not forget to delete the softSolver:
delete dynamicsWorld;
delete softSolver; // This one
delete solver;
delete collisionConfiguration;
delete dispatcher;
delete broadphase;
And to add these #includes directives (they are not included by btBulletDynamicsCommon.h):
#include <BulletSoftBody/btDefaultSoftBodySolver.h>
#include <BulletSoftBody/btSoftBodyRigidBodyCollisionConfiguration.h>
#include <BulletSoftBody/btSoftRigidDynamicsWorld.h>
A last thing is to add the library BulletSoftBody to the build settings of the project. It must be placed before BulletDynamics in most compilers, due to the dependency order.
Creating Soft bodies
Now that the world is correctly initialised, we can add soft bodies to it. To create soft bodies, we can either:
- Build the soft body manually by instantiating it, then using methods such as
appendLink()andappendFace()to construct the mesh. Or: - Use a helper class that Bullet provides called
btSoftBodyHelper. This class mainly consists of a set of static methods intended to create soft bodies.
We will naturally use the helper class here. For example, we can use it to create a cloth and a sphere as triangle mesh soft bodies. For tetrahedral meshes, please see the appropriate chapter.
To create a cloth, the class provides this method:
static btSoftBody* CreatePatch (btSoftBodyWorldInfo& worldInfo, const btVector3& corner00, const btVector3& corner10, const btVector3& corner01, const btVector3& corner11, int resx, int resy, int fixeds, bool gendiags)
which takes the following arguments:
- worldInfo: the object returned from
dynamicsWorld->getWorldInfo() - corner00, corner10, corner01 and corner11: coordinates of the four corners, see below
- resx and resy: horizontal and vertical resolution
- fixeds: integer that indicates which node to fix, see below
- gendiags: whether to generate diagonal links
There exists also the function CreatePatchUV() which takes the same parameters, but supports “UV Texture Coordinates”.
And here is the explanation of the cornerXX and fixeds parameters (taken from the btSoftBodyHelpers.cpp source comments with some fixes):
* corners:
*
* [0][0] corner00 ------- corner10 [resx][0]
* | |
* | |
* [0][resy] corner01 -------- corner11 [resx][resy]
*
*
* “fixeds” map:
*
* corner00 –> +1
* corner10 –> +2
* corner01 –> +4
* corner11 –> +8
only with CreatePatchUV():
* upper middle –> +16
* left middle –> +32
* right middle –> +64
* lower middle –> +128
* center –> +256For example,
btSoftBody* cloth = btSoftBodyHelpers::CreatePatchSoftUV(
btVector3(0, 5, 0),
btVector3(3, 5, 0),
btVector3(0, 1, 0),
btVector3(3, 1, 0),
10, 10, 1 + 2 + 16 , false);
will create a squared cloth floating above the world origin, anchored by the upper left, upper middle and upper right nodes.
Like rigid bodies, you need to add it to the world:
dynamicsWorld->addSoftBody(cloth);
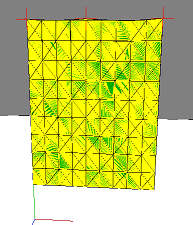
To give more resistance to bending, we can add bending constraints.
cloth->generateBendingConstraints(2);
This actually adds links between nodes which are at 2 nodes distance.
Without bending constraints:
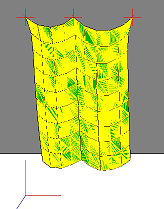
With bending constraints:
To create a sphere-shaped soft body, the function is simpler:
static btSoftBody* CreateEllipsoid(btSoftBodyWorldInfo& worldInfo, const btVector3& center, const btVector3& radius, int res)
The class btSoftBodyHelpers provides also other functions to create triangle mesh soft bodies from some mesh data (from triangle mesh or from vertices only).
/* Create from trimesh */
static btSoftBody* CreateFromTriMesh( btSoftBodyWorldInfo& worldInfo,
const btScalar* vertices,
const int* triangles,
int ntriangles,
bool randomizeConstraints = true);
/* Create from convex-hull */
static btSoftBody* CreateFromConvexHull( btSoftBodyWorldInfo& worldInfo,
const btVector3* vertices,
int nvertices,
bool randomizeConstraints = true);
Note that all the previous functions create soft bodies as triangle meshes. The only function that creates a tetrahedral mesh is CreateFromTetGenData and is discussed in the Importing from Blender as tetrahedral Soft Bodies chapter.